
Kétdimenziós élőlény alkothat némi fogalmat arról, hogyan nézhet ki egy háromdimenziós objektum, ha megfigyeli annak kétdimenziós árnyékát. Ugyanígy mi is tanulhatunk a négydimenziós világ természetéről, ha megfigyeljük az ottani objektumok, jelenségek “árnyékát” a mi világunk fizikai rendszereiben.
“Fizikai értelemben nincs 4D-s térbeli rendszerünk, de hozzáférhetünk 4D-s kvantumos Hall-fizikához ezekkel az alacsonyabb dimenziójú rendszerekkel, mivel a magasabb dimenziójú rendszerek kódja megjelenik a vizsgált struktúrák bonyolultságában” – mondta Mikael Rechtsman a Penn State University professzora a Gizmodonak. “Egyszer talán képesek leszünk előállni a magasabb dimenziók új fizikájával, és aztán olyan eszközöket tervezni, amelyek kihasználják a magasabb dimenziójú fizikát az alacsonyabb dimenziókban.”

Egyesek szerint lehetetlen elképzelnünk a 4D-t, mivel be vagyunk határolva a 3D-re, ezáltal nem is tudjuk közvetlenül megtapasztalni. Viszont mégis van megoldás, lehetséges meglehetősen jó fogalmat kialakítanunk magunkban arról, hogy milyen is a 4D világ. A megoldás abban rejlik, hogy N dimenzió látásához az embernek csak (N−1) dimenziós retinára van szüksége.
Habár 3D-s világban élő, 3D-s élőlények vagyunk, szemünk valójában csak 2D-ben lát. Retinánknak csak 2D-s felszíne van, amellyel a szembe érkező fényt érzékelni tudja. Szemünk valójában nem 3D-t lát, hanem csak az általunk ismert 3D-s világnak egy 2D-s vetületét.
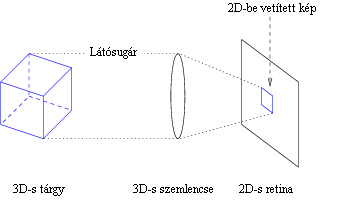
Ennek ellenére könnyedén képesek vagyunk a 3D fogalmát megérteni. Agyunknak semmi gondot nem okoz a retinánk által látott 2D-s képekből rekonstruálni a körülöttünk lévő világ 3D-s modelljét. A 2D-s képeken lévő közvetett információk révén képes erre, mint például a fény-árnyék viszonyok és a rövidülés, valamint korábbi tapasztalataink alapján. Még ha retinánk valójában nem is lát 3D-s mélységet, ösztönösen következtetünk rá. Igen jó intuitív benyomásunk van arról, mi az a 3D, olyannyira, hogy rendszerint nem is vagyunk cseppet sem tudatában, hogy csak 2D-ben látunk.
Egy ottani 4D-s lénynek hasonlóképpen 3D-s retinája lenne, a 4D-s világot pedig 3D-s vetületként látná.
Nem látná közvetlenül a negyedik dimenziót, de közvetett információkból, például a fény-árnyék viszonyokból, a rövidülésből és korábbi tapasztalataiból következtetne rá.
Itt abban rejlik a megoldás, hogy a 4D-s lény a retináján 3 dimenziós, nem pedig 4 dimenziós képet lát. Csupán következtet a 4. dimenzióra. De mivel a 3D-ről nekünk is jó intuitív fogalmaink vannak, korántsem olyan nehéz megértenünk mit lát egy 4D-s lény a retináján. Ekkor pedig már csak azt kell megtudnunk, hogyan következtethetünk a 4D-s mélységre.
Dimenziós analógia, a tárgyak határai
Az 1D-s világban csak egy tengely mentén mozoghatunk: az X tengely mentén. Minden tárgynak csak egyetlen dimenziója lehet: hosszúsága, mivel nincs több dimenzió, ahol a szélességnek vagy magasság lehetne. 1D-ben csupán kétféle tárgy fordulhat elő: a pont, ami 0D-s, és a vonal, ami 1D-s. Ahhoz, hogy egy vonaldarabot ( szakaszt) az 1D-ben meghatározzunk, elegendő megadni a kiindulópontját és a végpontját. Más szóval, egy 1D-s tárgynak a határai pontokból állnak, amelyek 0D-sek.
A 2D-s világ sík, mint egy papír felülete. Ez a világ sokkal érdekesebb már mint az 1D-s világ, mivel többféle tárgy lehetséges benne. A pontok és vonalak mellett előfordulhatnak például sokszögek és körök is: Mi határolja a sokszöget? Szakaszok határolják, melyek 1D-sek. A körnek is 1D-s határvonala van, noha görbe. A 2D-s tárgyakat tehát 1D-s vonalak és görbék határolják.
A 3D-s világban lévő tárgyakat nem vonalak vagy görbék, hanem 2D-s felületek határolják. A kockát például 6 négyzet határolja, a golyót pedig gömbfelület. A gömbfelület is 2D-s, mivel bármely pontját meg lehet határozni csupán két paraméterrel: a hosszúsággal és a szélességgel.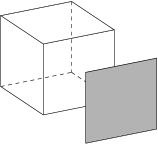
Egy rendszer rajzolódik ki előttünk. Az 1D-s tárgyakat 0D-s pontok határolják, a 2D-s tárgyakat 1D-s vonalak (vagy görbék) határolják, a 3D-s tárgyakat pedig 2D-s felületek. Más szóval, az 1D-ben lévő pontok analógok a 2D-ben lévő vonalakkal és görbékkel: ezek alkotják a saját dimenziójukban létező tárgyak határát. A 2D-ben lévő vonalak és görbék ugyanígy analógok a 3D-beli felületekkel. A dimenziós analógia alapján azt látjuk, hogy N dimenzióban a tárgyakat (N−1) dimenziós határok veszik körül.
Ebből arra következtethetünk, hogy 4D-ben a tárgyakat nem pontok, vonalak vagy akár felületek határolják, hanem térfogatok. A dimenziós analógia nélkül ezt aligha ismerhetnénk fel. Amint azt később látni fogjuk, egy 4D-s kockát például 8 kocka határol. Ezeket a határoló térfogatokat hívjuk a 4D-s kocka celláinak.
A látás
Hogyan lesz a síkból tér?
A retinánkra kicsinyített, fordított, sík, vagyis kétdimenziós kép vetül. Hogyan lesz ebből olyan képi információ, amely nemcsak a tárgyak magasságát és szélességét, hanem mélységét, térbeli helyzetét, egymástól való távolságát, sőt, mozgását is érzékelteti? A bonyolult kis optikai műszeren, a szemünkön keresztülhaladó fény a szem ideghártyájára, a retinára jut, ahol receptorok ingerületté alakítják, amit idegrostok juttatnak az agyba. Az újabb kutatások azt a feltételezést igazolták, hogy a retina maga is az agyhoz tartozik, annak egy nyúlványa, és bizonyos irányítás, előzetes szelekció már itt megtörténik, mielőtt az impulzus az agyba továbbítódik. A látószervektől kapott információkból az agy alkot háromdimenziós képet.
Fél szemmel, emlékezetből
Az ún. sztereoszkopikusság-elmélet, miszerint a térlátásunkat a kétszeműségünknek köszönhetjük, azon a tapasztalati tényen dől meg hogy azoknak is megfelelő maradhat a térlátása, akik betegség vagy baleset nyomán elvesztették egyik szemük látóképességét. Több kutató emiatt cáfolta ezt az elméletet, illetve pontosította azzal, hogy a távolságot nem a szemünk érzékeli, hanem a látás során kapott információkat az agyunk egészíti ezzel a megszokás által (Berkeley). James Gibson is úgy vélte, hogy a mélységérzet tapasztalás eredményeként alakul ki, tehát nem születésünktől fogva meglévő, hanem szerzett, tanult képesség. Vagyis, bár a térlátáshoz ugyan két szem kell, de az egy szemmel látott, kétdimenziós képet az agy a korábbi rögzült tapasztalatai szerint kiegészíti olyan háromdimenzióssá, mint amilyen a sérülés előtt tudatosult az illetőben.
A dimenziós analógia egy másik alkalmazása: egy N dimenziós lény szemében lévő retina dimenziója.
Mi 3D-s lények vagyunk, szemünk viszont csak 2D-ben lát, mert retinánkat fényérzékeny sejtek 2D-s együttese alkotja. Miért csak 2D-s a retinánk? Bizonyára sokkal jobb lenne, ha 3D-s lenne a retinánk, hogy 3D-s világunk minden részét egyszerre láthassuk, ugye? Ez azért van így, mert ahhoz, hogy bármit is lássunk, a fénynek akadálytalanul el kell jutnia a látott tárgyról a retinánk sejtjeihez.
A 2D-s retina azért működhet, mert létezik egy 3. dimenzió, amelyben a fény akadálytalanul eljuthat a tárgyról a retinára. Ha azonban a retinánk 3D-s lenne, semmivel se látnánk többet, mivel a fénynek át kell haladnia a külső felület sejtjein ahhoz, hogy a beljebb lévő sejteket elérje, ami annyit tesz, hogy beljebb lévő sejtek semmi mást nem látnának, csak amit már a kijjebb lévő sejtek is láttak. Mivel 3D-re vagyunk korlátozva, nem áll rendelkezésre egyéb dimenzió, amelyben a fény eljuthatna ezekhez a belsőbb sejtekhez valami saját, különálló útvonalon, amiből további látási információt nyerhetnénk.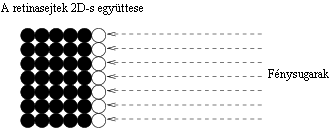
Ebből a dimenziós analógia alapján arra következtethetünk, hogy egy 2D-s lénynek csak 1D-s retinája lehet. Amint a fenti ábra mutatja, ha egy lény 2D-re van korlátozva, a fénynek nem áll rendelkezésére olyan akadálytalan útvonal, amelyen egy 2D-s tárgyról egy 2D-s retina belső sejtjéhez eljuthat. Mindaz a fény, ami egy belső sejtet elér, már egy külső sejten is áthaladt, így ez a lény semmivel se látna többet 2D-s retinával.
A dimenziós analógia révén arra is következtetni tudunk, hogy 4D-ben már elképzelhető a 3D-s retina, mivel itt már a fénynek rendelkezésére áll egy külön dimenzió, amelyben akadálytalanul eljuthat a látott tárgyról a retina bármely pontjára.

A 4D megjelenítése
3D-ben három fő forgatás létezik: az XY, az YZ és az XZ síkok mentén való forgatás. Minden 3D-s forgatást vissza lehet vezetni ezeknek a fő forgatásoknak valamely kombinációjára. Az azonban, hogy 3D-ben épp 3 fő forgatás van, csupán véletlen egybeesés: a fő forgatások száma általában véve nem esik egybe a dimenziók számával. 2D-ben például csak egy forgássík van, ami maga a 2D-s sík. Amint látni fogjuk, 4D-ben a fő forgatások száma nem négy, hanem hat.
A különböző fő forgatások száma a dimenziók közt alkotható párok számával azonos. 1D-ben például nem létezhet forgatás, mert csak egy tengely van, az X tengely, és nem lehet párt alkotni. 2D-ben már két tengely van: az X és az Y, és ők alkotják az egyetlen lehetséges párt, így pontosan 1 forgássík létezik. 3D-ben három tengely van: X, Y és Z, ebből 3 lehetséges pár adódik: XY, XZ és YZ. Ezért van 3D-ben 3 fő forgatás. 4D-ben azonban négy tengelyünk van: X, Y, Z és W, ennélfogva hat párt lehet képezni belőlük: XY, XZ, XW, YZ, YW és ZW.
A 4D-s forgatások
Hat fő forgatást kell megismernünk 4D-ben, kétszer annyit, mint 3D-ben!
Ez azonban nem olyan nehéz, ahogy talán első látásra tűnik. A megoldás: a 4D-s forgatásokat vetületek révén képzelhetjük el.
Gondoljuk el, hogyan taníthatnánk meg egy 2D-s lénynek a 3D-s forgatást. Ennek egyik hasznos módszere az lenne, hogy a Z tengely szerinti vetítéshez folyamodhatnánk, így a 3D-s tér X és Y tengelye a 2D-nek az X és Y tengelyére képeződne le, a Z tengelyt pedig egyetlen pontba sűrítenénk. Így nézne ki ennél a vetítésnél egy négyzet, amely az XZ síkban forog:

Mi, 3D-s lények ezt minden további nélkül tudjuk nyomban 3D-ben értelmezni, de gondolkodjunk egy pillanatra csupán 2D-s nézőpontból. Ahelyett, hogy a síkban forgó négyzet lenne (a 2D-s lény a forgatásnak csak ezt a fajtáját ismeri), a négyzet látszólag egy képtelen torzulás során át- és átfordul önmagába. Mi persze 3D-s nézőpontunk révén tudjuk, hogy nem erről van szó; csak azért tűnik ilyennek a forgatás, mert oldalról látjuk.
És hogy néz ki egy YZ síkban forgó négyzet?

Itt is az „átfordulásos” hatást látjuk. Ez a forgatás, úgy tűnik, megegyezik az előzővel, kivéve, hogy az „átfordulásos” hatás az Y tengely mentén megy végbe, nem pedig az X tengely mentén. Nézzük meg végül az utolsó fő 3D-s forgatást, ami az XY síkban zajlik:
Figyeljük meg, hogy ez a forgatás szakasztott úgy néz ki, mint a 2D-s forgatás. Nincs okunk meglepődni ezen, hiszen az XY síkban lévő forgatás épp azonos a 2D-ben meglévő egyetlen fő forgatással.
Azt látjuk tehát, hogy a 3D-s forgatások 2D-be való vetületei kétféleképpen jelenhetnek meg: vagy teljesen szokványos 2D-s forgatásként, vagy pedig látszólagos „átfordulásként”. A szokványos kinézetű forgatás az, amelyik az XY síkban zajlik, s ami épp azonos a 2D-beli fő forgatással. Az „átfordulásos” forgatások azok, amelyek a Z tengelyt tartalmazó síkokban történnek: ez a tengely nyúlik ki a 2D-s síkból. Ezek az „átfordulásos” forgatások továbbá teljesen azonos kinézetűek, az irányukat leszámítva.
4D-ben is pont ugyanez történik: a 6 lehetséges fő forgatás közül 3 szakasztott ugyanúgy néz ki, mint az a 3 fő 3D-s forgatás, amelyeket már ismerünk. Ezek az XY, XZ és YZ síkok szerinti forgatások, amelyek épp azonosak a 3 fő 3D-s forgatással. A további forgatásoknál merül fel a W tengely: az XW, az YW és a ZW síkban való forgatásoknál. Ezek látszólag „átfordulnak”. Az alábbi animációkon egy kocka látható az egyes forgatások során:
A rögzített síkokat piros szaggatott vonallal jelöltük. Figyeljük meg, hogy mindhárom forgatás ugyanolyannak tűnik, kivéve, hogy az „átfordulás” rendre az X, az Y és a Z tengely mentén történik. Ezért valójában csak egyetlen új típusú forgatással kell megismerkednünk, és máris teljes mértékben megértettük a 4D-ben meglévő mind a 6 fő forgatást.
Ne feledjük, hogy mindezeknél az animációknál a kocka valójában nem torzul el és nem is fordul át. Ez a látszat mindössze a 4D-ből 3D-be való vetítésből fakad. A kocka az összes forgatás során változatlanul megőrzi alakját.
A Clifford-forgatások
Korábban említettük, hogy a forgatáshoz 2 dimenzió kell, valamint azt is, hogy 4D-s forgatásoknál azért lehet rögzített síkokról beszélni, mert 2 dimenzió marad meg. A figyelmes olvasónak esetleg feltűnhet, nem lehetséges-e ebben a rögzített síkban egy második, eltérő forgatás is, hiszen egy újabb forgatás 2 további dimenzióban is történhet. Más szóval: lehetséges-e, hogy egy tárgy egyszerre forogjon az XY sík és a ZW sík körül, lehetőleg más-más forgási sebességgel, hiszen mindkettejük forgássíkja épp a másikuk rögzített síkjába esik?
Válaszunk: igen, lehetséges. Semmi akadálya annak, hogy egy 4D-s tárgy egyszerre forogjon az XY és a ZW síkban – vagy éppen az XZ és az YW síkban, vagy az YZ és az XW síkban. Ezeket az összetett forgásokat a matematikában Clifford-forgatások (vagy Clifford-jellegű forgatások) néven ismerik. Hogy elkülönítsük ezektől az eddig vizsgált forgatásokat, az utóbbiakra síkbeli forgatásként fogunk hivatkozni. A Clifford-forgatásokat két, egymástól független, egyszerre zajló síkbeli forgatásra lehet felbontani, így két független forgási sebességük lehet.
A matematikusok már régóta tudnak a Clifford-forgatásokról, bár nem sokan tudják egykönnyen elképzelni őket, különösen azért, mert 4-nél kevesebb dimenzióban nem lehetségesek. Annak alapján azonban, amit eddig megtudtunk, minden további nélkül megnézhetünk egy 4D-s Clifford-forgatást. Ez mindössze olyan forgatás, amelynek vetítésekor egyszerre zajlik egy 3D-szerű és egy „átfordulásos” forgatás. Ez például egy olyan kocka, amely egyszerre forog az XY és a ZW síkban:
Az „átfordulásos” forgatás a függőleges Z tengely mentén zajlik, ami a ZW síknak felel meg; a 3D-szerű forgatás pedig az XY síkban megy végbe. Figyeljük meg, hogy a ZW sík az Y tengelyre vetül, ami a 3D-s XY síkbeli forgatás tengelye.
A 4D-s Clifford-forgatásnál nincs rögzített sík, mivel a forgatás mind a 4 dimenziót igénybe veszi. Van azonban rögzített pontja, ami a jelenlegi két síkbeli forgatás rögzített síkjainak metszete. (A 4D-ben két sík többnyire csak egyetlen pontban metszi egymást.) Esetünkben a kocka rögzített pontja a kocka közepén található.
Cellák, ormok és élek
4D-ben a tárgyaknak jóval gazdagabb szerkezete van, mint 3D-ben. Egy 3D-s poliédernek, például a kockának, vannak csúcsai, élei és oldalai, és egy 3D-s térfogatrészt töltenek ki. A kockát oldalak veszik körül, melyek 2D-sek. A szomszédos oldalak élek mentén találkoznak, melyek 1D-sek, az élek pedig csúcsokban futnak össze, amelyek 0D-sek.
4D-ben a tárgyaknak, például a hiperkockának, nemcsak csúcsai, élei és oldalai vannak, hanem cellái is. Egy 2D-s felület nem elég ahhoz, hogy egy 4D-s tárgyat körbevegyen.
A 4D-s tárgyakat ehelyett 3D-s cellák veszik körül. A szomszédos cellák nem élek mentén találkoznak, hanem 2D-s oldalak, ún. ormok mentén. Maguk az ormok élek mentén érnek össze, az élek pedig csúcsokban találkoznak.
Hol van a hiperkocka belseje?
A dimenziós analógia révén világos választ kell kapnunk erre: itt a 4D-s mélységről van szó. A belső kocka mélyebben van a 4. irányban, mint a külső kocka, így hát bőséges hely jut közöttük a hiperkocka belsejének. A benne foglalt tér valójában a két szemközti kocka közt lehetséges összes kocka összege, amint az alábbi animáción látható:
Azon van a hangsúly, hogy 4D-ben a 3D-s térfogatrészeknek a 3D-beli felületek felelnek meg, a 2D-s ormoknak pedig az élek. A 4D-s tárgyakat ezért fontos határoló térfogatrészek segítségével elképzelnünk, nem pedig 2D-s felületekkel. Egy 2D-s felület 4D-ben csak egy vékony zsinórnak megfelelő területet fed le! Ha egy 4D-s kép vetületében 2D-s felületet látunk, tisztában kell lennünk vele, hogy az csupán orom, nem pedig határoló felület.
A vetületek
Egy vetített tárgy burka a képének a külső körvonalát jelenti. A 3D-s kocka alábbi képének például hatszögletű burka van. A vetített képnél nem a burok a lényeg, hanem annak belső szerkezete. A belső szerkezet nyújt betekintést a tárgy struktúrájába. Ha például annyit tudunk, hogy a kockának hatszögletű burka van, azzal még önmagában nem sokra megyünk; többet tudunk meg, ha megfigyeljük, hogyan helyezkedik el a kocka három vetített oldala az illető hatszögön belül.
Nézzük meg még egyszer a 3D-s kocka vetületét. A képnek melyik részére esik automatikusan a tekintetünk? A kép középső részére esik, ahol a kocka felénk eső csúcsánál lévő 3 él összefut. Tekintetünk olyan spontán módon erre a központi területre koncentrál, hogy általában észre sem vesszük, hogy a kocka fenti képének hatszögletű a burka! De ha 2D-s lények lennénk, nagyon is másfajta nézőpontunk lenne: először a hatszögletes burokra figyelnénk föl, és hajlamosak lennénk a hatszögletes burkot a kockával azonosítani. Ami azonban igazán figyelemre méltó, az a burok belsejében van.
Mindez talán nyilvánvalónak tűnik, ám nagyon fontos észben tartanunk ezeket, amikor összetett 4D-s tárgyak 3D-beli vetületeit kezdjük el vizsgálni. Ezeknek a vetületeknek gyakran lenyűgöző burkuk van, például rombikus dodekaéderek, köboktaéderek vagy más érdekes poliéderek. Hajlamosak vagyunk ezeket a poliéderburkokat tudat alatt magával a 4D-s tárggyal azonosítani, mert ahhoz vagyunk szokva, hogy a 3D-s tárgyakat felszínük alakjából azonosítjuk. A 4D-s tárgyak szerkezetével kapcsolatos legtöbb információ azonban a burok belsejében rejlik.
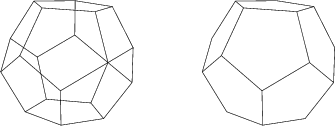
A 4D-s hiperkocka vetülete
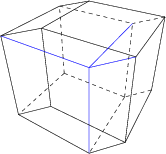
Figyeljük meg a 4D-s hiperkocka csúcs felőli vetületét. Burka rombikus dodekaéder, egy olyan poliéder, amelyet 12 rombusz határol. Hajlamosak vagyunk rá, hogy csak ezt a rombikus dodekaéder alakú burkot vegyük figyelembe, amely már önmagában is érdekes:
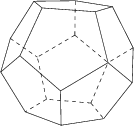
Azonban ha csupán erre koncentrálunk, nem fogjuk tudni, hol helyezkednek el a képen a hiperkocka cellái. Mi több, még a hiperkocka csúcsát se látnánk, amit a 4D-s szemlélő néz! A hiperkocka csúcsa ennek a dodekaédernek valójában a közepébe vetül, nem pedig bármely csúcsára. Ott helyezkedik el, ahol a kékkel jelölt belső élek összefutnak az alábbi ábrán:
Ha ismerjük a vetületnek ezt a belső szerkezetét, a hiperkocka négy, kocka alakú cellájára is könnyebben rátalálunk, amelyek éppen láthatóak:
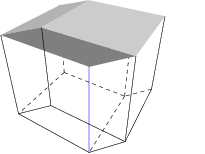

Ezek a cellák torzított kockáknak tűnnek, de valójában tökéletesen szabályos kockák. Csak azért tűnnek torzítottnak, mert a perspektivikus vetítés miatt megrövidülnek.
Ha egy 4D-s lény a hiperkockára néz, tekintete először a kocka alakú celláknak a képen lévő elrendezésére esik, nem magára a burokra. A burok csak mellékes, a kép belseje számít igazán. Amikor 4D-s tárgyak vetületét vizsgáljuk, mindig a belső szerkezetre koncentráljunk, ne engedjük, hogy a burok elvonja róla a figyelmünket.
Ne feledjük, hogy a hiperkocka fenti képein a 8 cellájából csak 4 látható. Ennek az az oka, hogy a másik 4 cella e négy mögött található, így fedésben vannak.
A 4D-s vetület átláthatóbbá tétele
Ha egy 4D-s tárgyat kivetítünk, a mostani földi technológiával valójában két vetítést végzünk:
1.) 4D-ből 3D-be vetítünk, hogy létrehozzuk azt a 3D-s képet, amit egy 4D-s lény látna.
2.) 3D-ből 2D-be vetítünk, hogy ezt a számítógép képernyőjén megjeleníthessük.
A 4D-s tárgyak vetületei általában igen összetettek. Ha csak ebben a formában alkalmazzuk a fenti lépéseket, gyakran egy nagy, kusza vonaltömeget kapunk, ami csak összezavarja a szemlélőt. Bizonyos speciális eszközöket kell alkalmaznunk a képeken, például a rejtett felületek eltávolítását (RFE-t), hogy a képek értelmet nyerjenek számunkra.
Azonban a 3D-s képnek az első lépésnél létrejövő belső szerkezete is nagyon fontos, így nem alkalmazhatjuk vakon mindkét lépésnél az RFE-t. Ha pedig a második lépésre alkalmazzuk az RFE-t, a 3D-s képből csak a vetületburok fele marad meg. Az eredményből pedig semmire se jutnánk.
Ehelyett az első lépésre alkalmazzuk az RFE-t, hogy a létrejövő 3D-s kép ne legyen olyan zsúfolt, majd a második lépésnél alkalmazzuk a rejtett felületek közvetett jelölését, hogy a 3D-s kép belső szerkezete is megmaradjon, így a létrejövő 2D-s képen könnyebben felismerhetjük a 3D-s alakzatot.
A 3D-s dodekaéder alábbi képén például szaggatott vonallal jelöljük a rejtett éleket:
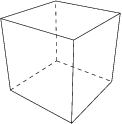
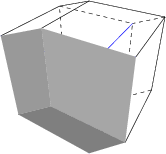
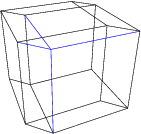
Próbáljuk ki ezeket a módszereket egy példán. Figyeljük meg a 4D-s hiperkocka alábbi vetületét RFE nélkül:
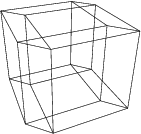
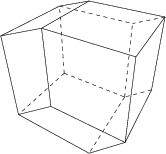
Elég bonyolult, nem? Most alkalmazzuk az RFE-t: távolítsuk el azokat az éleket, amelyek a 4D-s nézőpontból nem látszanak:
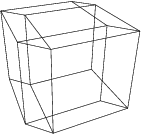
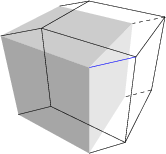
Valamivel jobb, de továbbra sem könnyű felismerni ennek a vetületnek a 3D-s alakját, mivel a 3D-s alakzatot 2D-be vetítjük. Ennek érdekében kékre színezzük azokat az éleket, amelyek a 3D-s burok belsejében vannak, hogy meg tudjuk különböztetni, mely élek alkotják a burkot, és melyek vannak belül:
Végül pedig szaggatott vonallal jelöljük azokat az éleket, amelyek 3D-s nézőpontunkból nem látszanak. (Figyelem: ne tévesszük ezt össze azzal, ha valami a 4D-s nézőpontból nem látszik: ezek az élek mind egyidejűleg láthatók a 4D-s nézőpontból!)
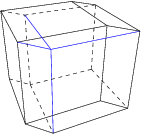
Most már jóval könnyebb megérteni a képet. Láthatjuk, hogy rombikus dodekaéder alakú burka van, amelynek három belső éle (a kékkel jelölt élek) egy csúcsban futnak össze a burok belsejében. Hasonlít a 4D-s hiperkockának arra a rombikus dodekaéder alakú vetületére, amit az előbb fent láttunk.


We love ❤️ Earth | We love ❤️ Mars | We love ❤️ Space

Technológiai Szingularitás – Mesterséges Intelligencia



Apply to be a United Nation’s Young Champion of the Earth 2019


Turning the tide on climate change – Enel Open Innovability

Appel à candidatures français: Concours d’innovation i-Lab 2019

We love Earth | We love Mars | We love Space
Follow us on:












再見 * Goodbye * Adiós * Au revoir * Adeus * Auf Wiedersehen * До свидания * Arrivederci * さようなら * Güle güle * Selamat tinggal * नमस्ते * Totsiens * Αντίο * معالسلامة * Tot ziens * Adiaŭ * Kwaheri * Do widzenia * Viszontlátásra *
